Úvod
Oscilátor s Wienovým můstkem je elektrický obvod generující sinusový signál. Stejně jako Phase-Shift nebo Quadrature oscilátor si vystačí pouze s několika rezistory, kondenzátory a operačním zesilovačem.
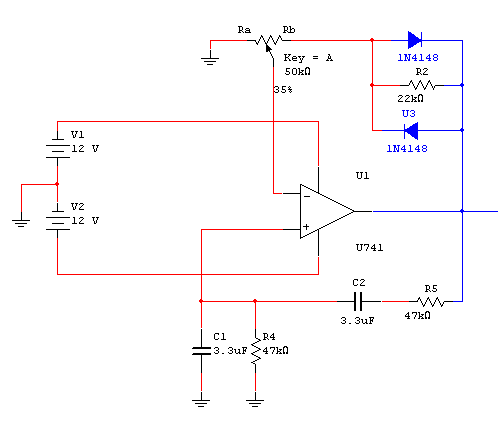 |
| Obrázek 1 - Oscilátor s Wienovým můstkem |
 |
| Obrázek 2 - Phase-shift oscilátor |
 |
| Obrázek 3 - Quadrature oscilátor |
Odvození
Přenos Wienova můstku z obr. 1 mohu vyjádřit jako
$G(s)=\frac{\frac{R_4}{1+sC_1R_4}}{\frac{R_4}{1+sC_1R_4}+R_5+\frac{1}{sC_2}}$
Pro zjednodušení položím
$C=C_1=C_2$
$R=R_4=R_5$
Dostávám
$G(s) = \frac{sCR}{C^2R^2s^2+3CRs+1}$
$G(jw) = \frac{jwCR}{1-C^2R^2\omega^2+3CRj\omega}$
Zjistím vlastní frekvenci systému
$1-C^2R^2\omega^2=0$
$w=\frac{1}{CR}$
Přenos se poté zjednoduší na
$G(jw) =\frac{1}{3}$
Nyní stačí rezistory \(R_a\) a \(R_b\) (trimmerem) nastavit zesílení operačního zesilovače na 3, čímž zajistíme výstup o konstantní amplitudě. Vzhledem k tomu, že elektronické součástky mají poměrně velké nejistoty, je do obvodu přidána kompenzace v podobě dvou diod a rezistoru, která dynamicky mění zesílení a udržuje jej na hodnotě 3. V případě poklesu pod tuto hodnotu by došlo k útlumu kmitání, naopak při vyšším zesílení by amplituda rostla.
Praktická realizace
Mým cílem bylo vytvořit generátor sinusového napětí o frekvenci 1 Hz a amplitudě 10 V, kterým bych nahradil generátor funkcí při práci s ultrazvukovým motorem.Podle vzorce
$w=\frac{1}{CR}$
$f=\frac{1}{2\pi CR}$
$R=47k\Omega$
$C=3.3\mu F$
V programu Multisim 9 Student Demo jsem simulací ověřil fungování oscilátoru s vypočtenými parametry a poté jsem generátor sestavil i z elektronických součástek. Narozdíl od simulace došlo v tomto případě, z nějakého důvodu, k desetinásobném zmenšení frekvence oproti očekávané hodnotě. Tento problém jsem jednoduše odstranil použitím rezistorů \(R=4.7k\Omega\). Domnívám se, že problém spočívá v použitých kondezátorech, které mohou dosahovat nejistoty -20%/+80% a jejichž kapacitu jsem neměl možnost změřit.
 |
| Obrázek 5 - výsledné zapojení generátoru sinusovky, řídicí elektroniky a ultrazvukového motoru |













