Úvod
V tomto článku podrobněji rozeberu princip fungování ultrazvukových piezomotorů z řady PILine
®, do níž patří i motor M-661, který mám k dispozici. Tímto článkem napravím chybu v úvaze a nepřesnosti, kterých jsem se dopustil v předchozích příspěvcích (
1,
2).
 |
| Obrázek 1 - ultrazvukový motor z řady PILine®, zdroj [2] |
Jak to tedy funguje
Piezokeramický element ve tvaru kvádru je opatřen třemi elektrodami, dvě elektrody jsou umístěny na jedné straně (dále přední strana), viz. obrázek 1, třetí elektroda pokrývá celou zadní stranu. Toto rozmístění lépe ukazuje obrázek 2.
 |
| Obrázek 2 - rozmístění elektrod na piezokeramickém elementu, zdroj [1] |
Ke vzniku pohybu dochází přivedením napětí na elektrody. Pro pohyb posuvného elementu (modře na obr. 1) jedním směrem je napětím buzena vždy jen na jedna elektroda na přední straně vůči elektrodě na straně zadní, druhá elektroda zůstavá v klidu, neboli "plave", jak je uvedeno v [
3].
Na elektrody je přivedeno napětí o frekvenci 210 kHz, což je rezonanční frekvence vibračního modu E(3,1). Ten vytváří v piezokeramickém elementu stojaté vlnění tvořené vlněním v podélném směru (ve směru osy X) a ve směru osy Z, viz. obr 3.
 |
| Obrázek 3 - piezokeramický element, zdroj [3] |
Vzhledem k asymetrickému buzení piezokeramiky (vždy je aktivní pouze jedna elektroda na přední straně) dochází k její vhodné deformaci, která se pomocí třecího elementu přenáší na lineární pohyb posuvného elementu. Toto ukazuje obr. 4.
 |
| Obrázek 4 - deformace piezokeramického elementu, zdroj [3] |
Výstupy řídící elektroniky
Tomuto tématu se věnoval již
předchozí příspěvek, ve kterém je řídicí elektronika představena. Z řídicí elektroniky do motoru vedou tři fáze, ta s označením P1 vede na společnou elektrodu pokrývající zadní stranu piezoelektrického elementu, fáze P2 a P3 vedou k elektrodám na straně přední.
Fáze jsou měřeny proti zemi (viz. obr. 5) a následně přepočteny na napětí aplikované
na piezokeramický element, obrázky 6 - 16 tedy ukazují rozdíl mezi
fázemi
P2 a P1 a
P3 a P1.
 |
| Obrázek 5 - výstup řídicí elektroniky, proti zemi |
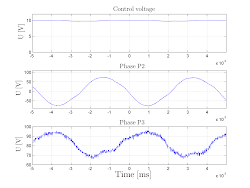 |
| Obrázek 6 - napětí na elektrodách, přepočítáno |
Fáze P3 na obrázku 6 ukazuje napětí na pasivní elektrodě, tedy té, která se aktivně nepodílí na pohybu daným směrem. Vzhledem k kapacitnímu chování piezokeramiky má vždy kladný offset. Fáze P2 je napětí na elektrodě, která způsobuje pohyb. Čerpáno z [
4].
Poznámka - řídicí napětí na obrázcích 7 a 8 není dostatečně velké, aby způsobilo pohyb motoru, k tomu je potřeba alespoň 2 V.
 |
| Obrázek 7 - napětí na elektrodách |
 |
| Obrázek 8 - napětí na elektrodách |
 |
| Obrázek 9 - napětí na elektrodách |
 |
| Obrázek 10 - napětí na elektrodách |
 |
| Obrázek 11 - napětí na elektrodách |
 |
| Obrázek 12 - napětí na elektrodách |
 |
| Obrázek 13 - napětí na elektrodách |
 |
| Obrázek 14 - napětí na elektrodách |
 |
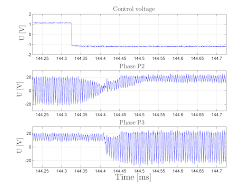
| Obrázek 15 - napětí na elektrodách |
 |
| Obrázek 16 - napětí na elektrodách |
Z těchto obrázků lze vypozorovat několik zajímavých věcí - skoková změna řídicího napětí se rychleji projeví na výstupních fázích řídicí elektroniky při skoku ze záporného napětí na napětí kladné. Platí také, že čím větší je řídicí napětí, tím déle trvá ustálení amplitudy fází. Nejdelší naměřená doba ustálení je 0,9 ms na obrázku 15. Pro srovnání na obr. 16, kde má řídicí napětí stejnou velikost, jako u měření na obr. 15, ale se skokem s opačnou polaritou, ustálení nastane po necelých 0,7 ms.
Odkazy
[1] Americký patent US 6765335 B2
[2] Motory řady PILine
[3] Vyshnevsky, O., S. Kovalev, and W. Wischnewskiy. “A Novel, Single-mode Piezoceramic Plate Actuator for Ultrasonic Linear Motors.” IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control 52, no. 11 (November 2005): 2047 –2053.
[4] Villgrattner, Thomas. Design and Control of Compact High Dynamic Camera Orientation Systems [Elektronische Ressource] / Thomas Villgrattner, 2010. http://nbn-resolving.de/urn:nbn:de:bvb:91-diss-20101021-982079-1-2.



































{kind=link}
{kind=link}