Úvod
V tomto článku předvedu fungování ultrazvukového motoru při použití jednoduchého řídicího signálu v podobě sinusovky, která způsobí kmitání motoru mezi oběma krajními polohami (viz. video) a stejnosměrného signálu, který zařídí pohyb do jedné krajní polohy. K těmto řídicím signálům ukážu výstupy jednotlivých fází z řídicí elektroniky.
 |
| Obrázek 1 - Zapojení řídicí elektroniky a dalších přístrojů |
Ultrazvukový motor v akci
Měření výstupu řídicí elektroniky
 |
| Obrázek 2 - třífázový výstup z řídicí elektroniky |
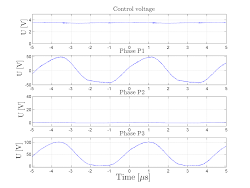
Řídicím napětím je sinusový signál o frekvenci 1 Hz z obr. 3. Výstupy jednotlivých fází P1 - P3 z řídicí elektroniky (obr. 2) jsou na obrázcích 4 - 6. Data byla naměřena osciloskopem MSO 6014a, který umožňuje uložit maximálně 1000 datových bodů a obrázky tedy zkreslují realitu. Nezachycují například správě frekvenci signálu v jednotlivých fázích, která dosahuje 210kHz.
 |
| Obrázek 4 - fáze P1 proti zemi |
 |
| Obrázek 3 - řídicí napětí vstupující do elektroniky |
 |
| Obrázek 5 - fáze P2 proti zemi
|
 |
| Obrázek 6 - fáze P3 proti zemi
|
Obrázky 7-13 zachycují výstupy řídicí elektroniky při stejnosměrném řídicím napětí. Možný rozsah tohoto napětí je -10 až +10 V. Polarita určuje směr pohybu motoru, lze tedy pozorovat, že jedna z fází, která způsobuje pohyb motoru na opačnou stranu, je nulová. Zaměnit směr pohybu motoru lze také přehozením vstupních pinů do řídicí elektroniky, viz. obrázek 13, nebo přehozením fází P2 a P3.
Výstupy řídicí elektroniky jsou měřeny proti zemi, podrobněji se jim věnuje
tento článek.
 |
| Obrázek 7 - výstup řídicí elektroniky |
 |
| Obrázek 8 - výstup řídicí elektroniky |
 |
| Obrázek 9 - výstup řídicí elektroniky |
 |
| Obrázek 10 - výstup řídicí elektroniky |
 |
| Obrázek 11 - výstup řídicí elektroniky |
 |
| Obrázek 12 - výstup řídicí elektroniky |
 |
| Obrázek 13 - výstup řídicí elektroniky |












Žádné komentáře:
Okomentovat